迟先生:138-5356-9717
邵先生:151-0655-5646
张女士:138-5359-5629
地址: 中国(山东)自由贸易试验区烟台片区福莱山街道天山路40号业达工业园2区
企业新闻
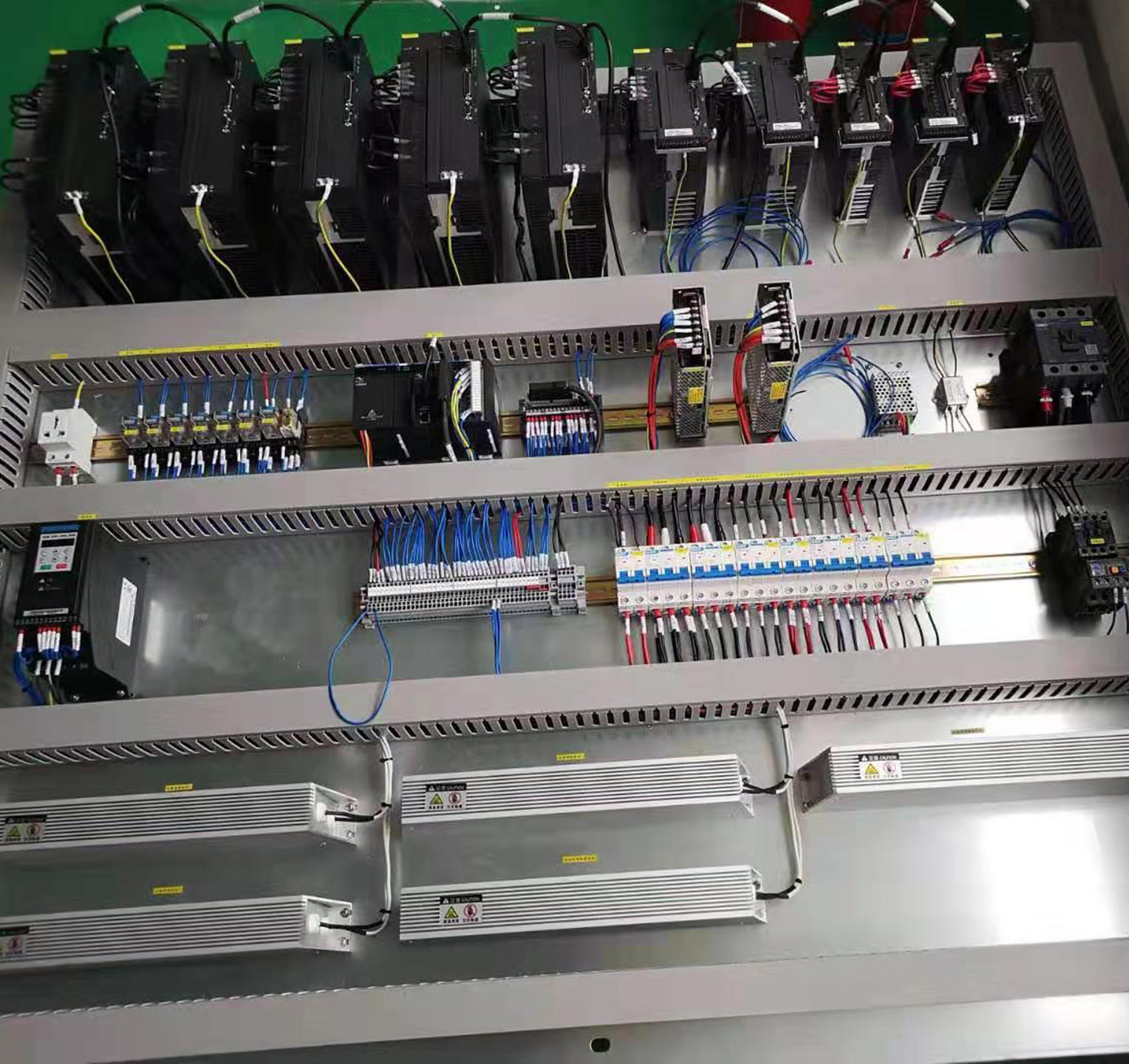
伺服系统的闭环控制原理与核心构成
在现代自动化设备中,无论是机床加工、机器人关节运动,还是高精度定位系统,都离不开伺服系统。它并不是单一设备,而是一整套实现精确运动控制的闭环自动控制系统。
伺服系统的核心任务,是让机械运动按照指令精确执行,并在执行过程中不断修正误差,最终实现快速、稳定、高精度的控制效果。
从结构上看,伺服系统主要由三大核心部分组成:伺服驱动器、伺服电机以及上位控制系统等外围结构。
可以把它理解为一个“人体运动系统”。
伺服系统是完整的运动神经系统,负责整体协调;伺服驱动器相当于“大脑与神经中枢”,负责计算与指令处理;伺服电机则像“肌肉与关节”,负责将电信号转化为实际的机械运动。
三者协同工作,才能实现真正意义上的精准控制。
首先看伺服电机。
它是动力执行单元,负责将电能转换为机械能。与普通电机不同,伺服电机内部通常集成高精度反馈装置,如光电编码器或旋转变压器。这些反馈装置会实时检测电机当前的位置、速度和状态,并将信号传回驱动器。
其关键技术参数包括额定扭矩、额定转速、转动惯量以及编码器分辨率,这些指标直接影响系统的响应能力和控制精度。
再看伺服驱动器。
驱动器既是控制核心,也是功率放大单元。它接收来自上位控制器(如PLC)的运动指令,对指令进行运算,并根据反馈信号不断进行误差修正。
其工作流程可以概括为四个步骤:
接收指令
接收反馈
比较与计算
调节输出
驱动器根据误差大小实时调整输出电流和电压,使电机运动始终逼近目标值。
关键技术参数包括控制模式(位置控制、速度控制、扭矩控制)、通信接口类型以及电流环、速度环、位置环的响应带宽等。
完整的伺服系统除了驱动器和电机,还包括上位控制器、机械传动机构以及被控对象。例如:
PLC负责发送运动指令
滚珠丝杠或齿轮负责传动
工作台或机器人关节作为执行终端
整个系统形成一个闭环控制结构。
用一个简单的工作流程来说明其运行逻辑:
当PLC向驱动器发送指令,要求电机转动到某个精确位置,例如1000个脉冲的位置时,驱动器会驱动电机旋转。
电机在旋转过程中,其内部编码器实时反馈当前位置信息,例如已经到达500个脉冲。
驱动器立即进行误差计算:
目标值1000 − 实际值500 = 误差500
根据误差大小,驱动器调整输出电流,使电机加速或减速。随着误差逐渐减小,驱动器逐步降低输出,实现平滑减速,最终精确停在目标位置。
这一“指令—反馈—比较—调整”的过程在毫秒级时间内持续循环进行,确保系统始终处于动态修正状态。
正是这种闭环控制机制,使伺服系统相比普通开环系统具有明显优势。
首先是极高的控制精度,可实现微米级定位。
其次是优异的动态响应能力,能够快速启停,并在高速状态下保持稳定。
同时具备较强的过载能力,在短时间内可输出数倍额定扭矩。
在负载变化时仍能保持速度基本恒定,稳定性极佳。
简而言之,伺服系统并不仅仅是电机控制设备,而是一整套精密运动解决方案。它通过驱动器与电机的协同工作,结合实时反馈机制,实现对机械运动的精准掌控,是现代自动化设备实现高效率与高质量生产的核心技术之一。
- 上一篇:变频器在矿山汽车化工行业的应用实践
- 下一篇:暂无
新闻资讯
-
2026-02-26 15:12:08
伺服系统的闭环控制原理与核心构成
-
2026-02-26 15:01:46
变频器在矿山汽车化工行业的应用实践
-
2026-02-26 14:37:09
变频器真的会拉开企业之间的差距吗?
-
2019-10-17 15:54:15
烟台欧能电子科技有限公司官网上线